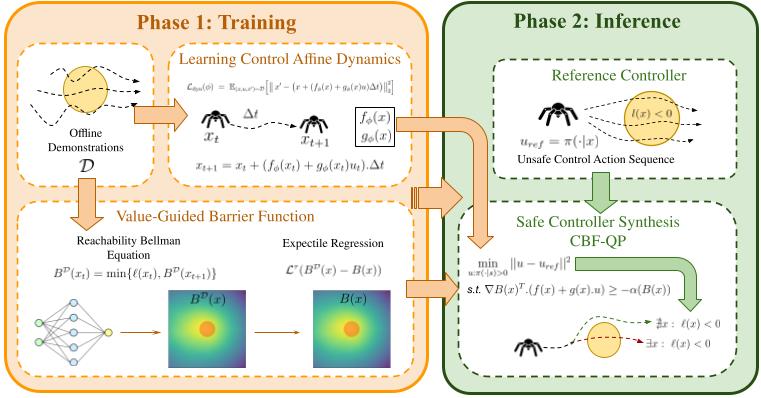
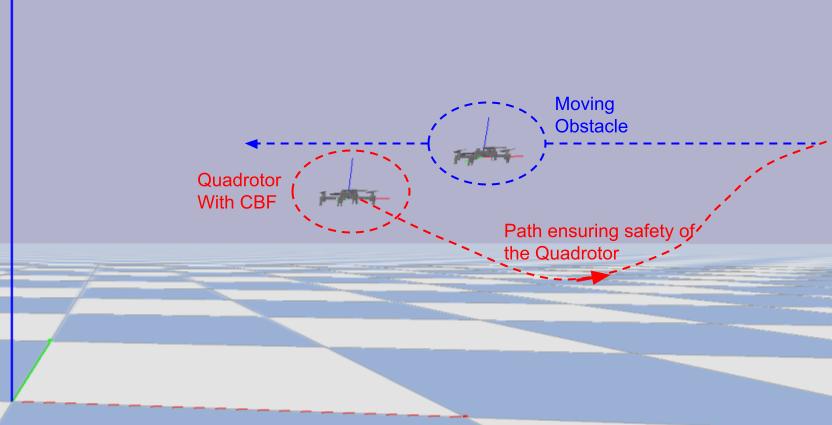
@article{tayal2025vocbf,title={V-{OCBF}: Learning Safety Filters from Offline Data via Value-Guided Offline Control Barrier Functions},author={Tayal, Mumuksh and Tayal, Manan and Singh, Aditya and Kolathaya, Shishir and Prakash, Ravi},journal={Transactions on Machine Learning Research (TMLR)},year={2026},url={https://openreview.net/forum?id=PGO9mpIyyb},note={Also accepted at AAAI Workshop on Deployable AI (DAI) 2026 (Oral)}}
TCST
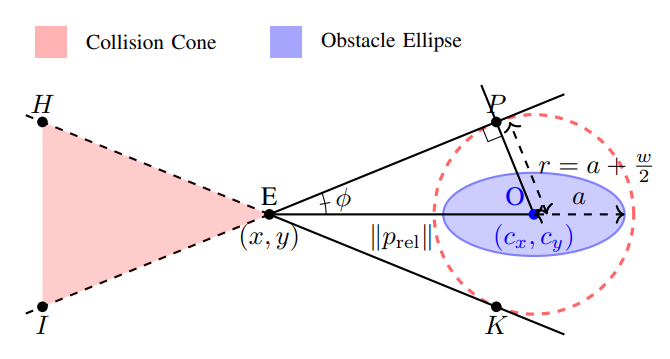
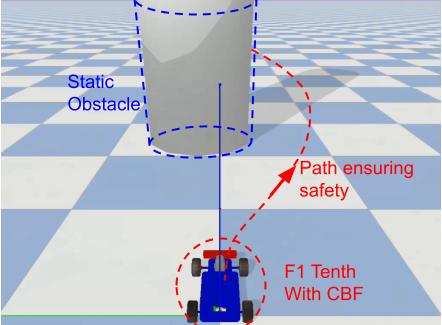
A Collision Cone Approach for Control Barrier Functions
@inproceedings{tayal2024collision,title={A Collision Cone Approach for Control Barrier Functions},author={Tayal, Manan and Goswami, Bhavya Giri and Rajgopal, Karthik and Singh, Rajpal and Rao, Tejas and Keshavan, Jishnu and Jagtap, Pushpak and Kolathaya, Shishir},journal={Transactions on Control Systems Technology (TCST)},booktitle={Transactions on Control Systems Technology (TCST)},year={2026},pages={1-14},doi={10.1109/TCST.2026.3661160}}
IEEE TAI
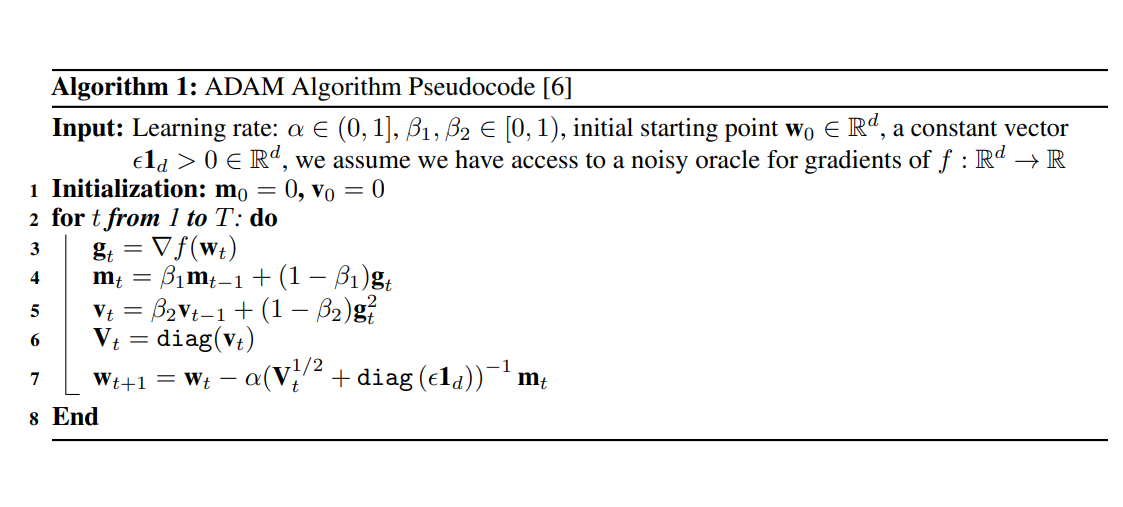
On Convergence of Adam with Data Dependent Stepsize
@article{mazumder2026convergence,title={On Convergence of Adam with Data Dependent Stepsize},author={Mazumder, Alokendu and Sabharwal, Rishab and Kumar, Bhartendu and Tayal, Manan and Garg, Chirag and Roy, Arnab and Rathore, Punit},journal={IEEE Transactions on Artificial Intelligence},year={2026},publisher={IEEE},pages={1-15},doi={10.1109/TAI.2026.3656866},}
Submitted
A Robust Physics-Informed Machine Learning Framework for Safe and Optimal Control of Autonomous Systems
Manan Tayal, Aditya Singh, Ganga Nair, Shishir Kolathaya, and Somil Bansal
Under Submission to The International Journal of Robotics Research (IJRR), 2026
@article{tayal2026robust_piml,title={A Robust Physics-Informed Machine Learning Framework for Safe and Optimal Control of Autonomous Systems},author={Tayal, Manan and Singh, Aditya and Nair, Ganga and Kolathaya, Shishir and Bansal, Somil},journal={Under Submission to The International Journal of Robotics Research (IJRR)},year={2026},}
Submitted
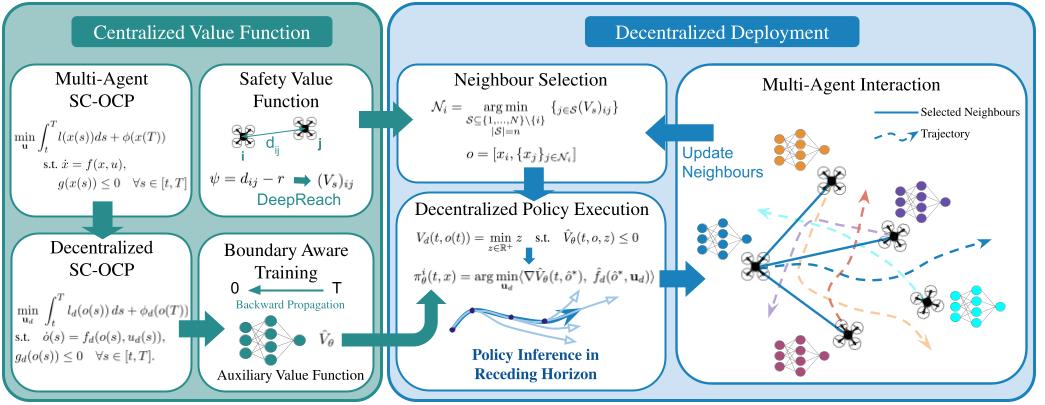
MAD-PINN: A Decentralized Physics-Informed Machine Learning Framework for Safe and Optimal Multi-Agent Control
Manan Tayal, Aditya Singh, Shishir Kolathaya, and Somil Bansal
Under Submission at Robotics and Automation Letters (RA-L), 2026
Also accepted at AAAI Workshop on Multi-Agent Path Finding 2026
@article{tayal2025madpinn,title={MAD-PINN: A Decentralized Physics-Informed Machine Learning Framework for Safe and Optimal Multi-Agent Control},author={Tayal, Manan and Singh, Aditya and Kolathaya, Shishir and Bansal, Somil},journal={Under Submission at Robotics and Automation Letters (RA-L)},year={2026},note={Also accepted at AAAI Workshop on Multi-Agent Path Finding 2026}}
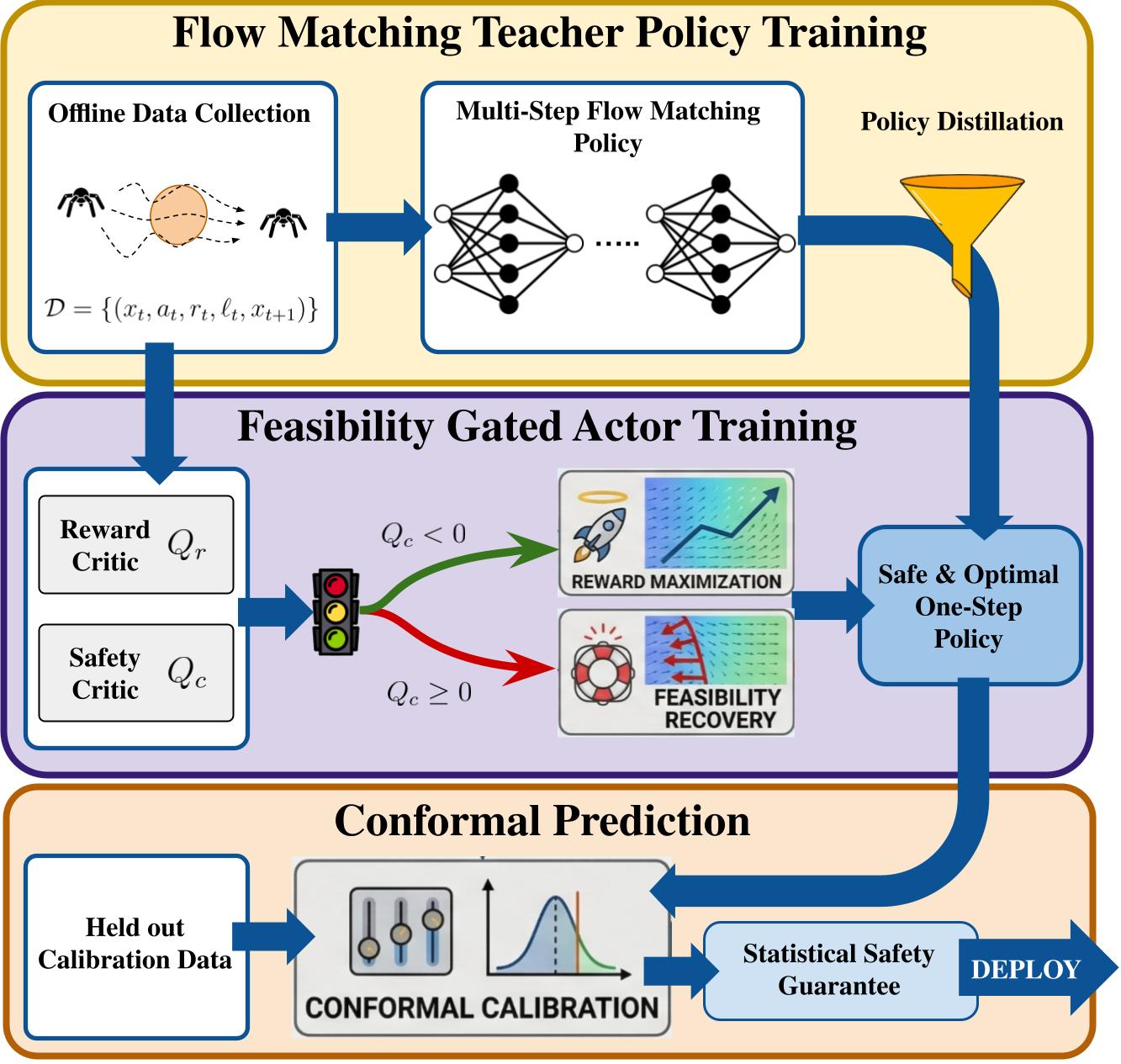
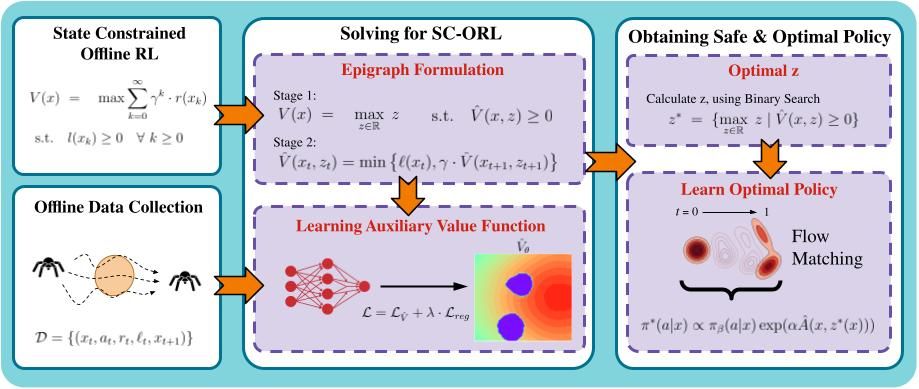
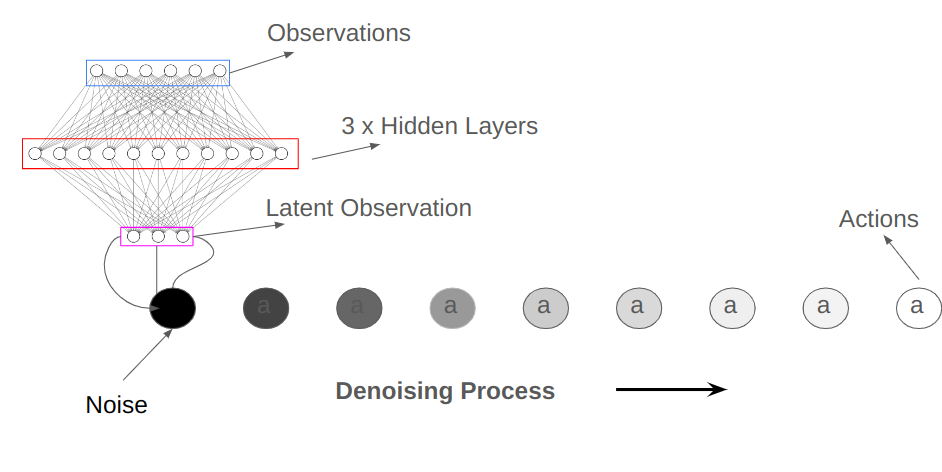
@article{tayal2026epigraph,title={Epigraph-Guided Flow Matching for Safe and Performant Offline Reinforcement Learning},author={Tayal, Manan and Tayal, Mumuksh},journal={Under Submission},year={2026},note={Also accepted at ICLR 2026 Workshop: VerifAI-2: The Second Workshop on AI Verification in the Wild}}
Submitted
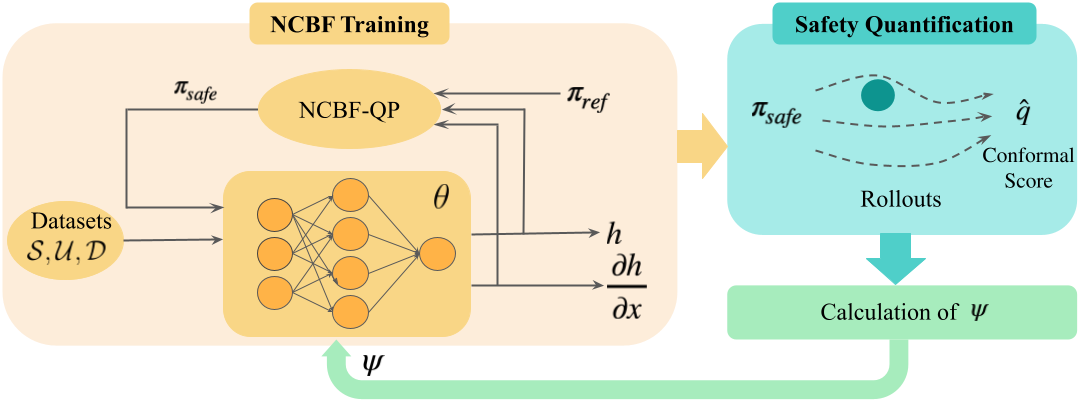
CP-NCBF: A conformal prediction-based approach to synthesize verified neural control barrier functions
Manan Tayal*, Aditya Singh*, Pushpak Jagtap, and Shishir Kolathaya
@inproceedings{tayal2025cp,title={CP-NCBF: A conformal prediction-based approach to synthesize verified neural control barrier functions},author={Tayal, Manan and Singh, Aditya and Jagtap, Pushpak and Kolathaya, Shishir},journal={arXiv preprint arXiv:2503.17395},booktitle={Submission},year={2026}}
2025
CDC
Semi-Supervised Safe Visuomotor Policy Synthesis using Barrier Certificates
Manan Tayal, Aditya Singh, Pushpak Jagtap, and Shishir Kolathaya
In 2025 IEEE 64th Conference on Decision and Control (CDC), 2025
@inproceedings{tayal2025semi,author={Tayal, Manan and Singh, Aditya and Jagtap, Pushpak and Kolathaya, Shishir},booktitle={2025 IEEE 64th Conference on Decision and Control (CDC)},title={Semi-Supervised Safe Visuomotor Policy Synthesis using Barrier Certificates},year={2025},}
ICC
Safe and Performant Controller Synthesis using Gradient-based Model Predictive Control and Control Barrier Functions
@inproceedings{singh2025safe,title={Safe and Performant Controller Synthesis using Gradient-based Model Predictive Control and Control Barrier Functions},author={Singh, Aditya and Mishra, Aastha and Tayal, Manan and Kolathaya, Shishir and Jagtap, Pushpak},booktitle={2025 IEEE Indian Control Conference (ICC)},year={2025},}
ICML
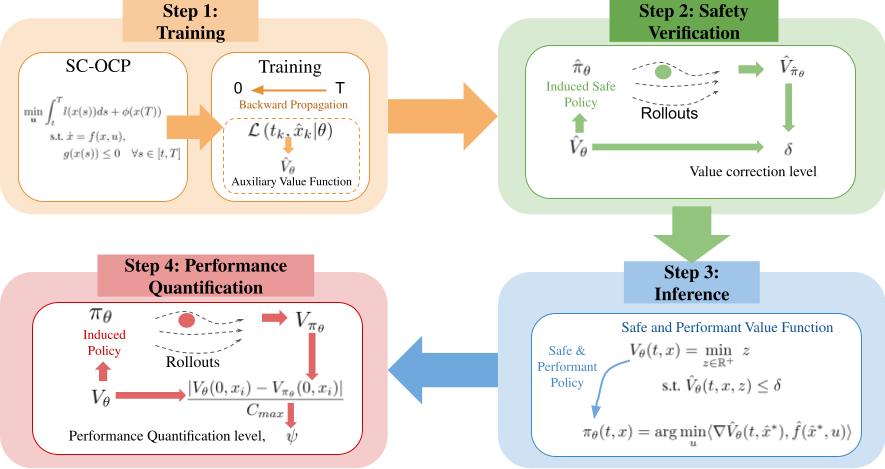
A Physics-Informed Machine Learning Framework for Safe and Optimal Control of Autonomous Systems
Manan Tayal*, Aditya Singh*, Shishir Kolathaya, and Somil Bansal
In International Conference on Machine Learning (ICML), 2025
@inproceedings{tayal2025physics,title={A Physics-Informed Machine Learning Framework for Safe and Optimal Control of Autonomous Systems},author={Tayal, Manan and Singh, Aditya and Kolathaya, Shishir and Bansal, Somil},booktitle={International Conference on Machine Learning (ICML)},year={2025}}
LeaPRIDE@IROS
RISE: Robust Imitation through Stochastic Encodings
Mumuksh Tayal, Manan Tayal, and Ravi Prakash
IROS 2025 Workshop on Learning, Planning, and Reasoning in Dynamic Environments, 2025
@article{tayal2025genosil,title={RISE: Robust Imitation through Stochastic Encodings},author={Tayal, Mumuksh and Tayal, Manan and Prakash, Ravi},journal={IROS 2025 Workshop on Learning, Planning, and Reasoning in Dynamic Environments},year={2025}}
2024
CDC
Learning a Formally Verified Control Barrier Function in Stochastic Environment
Manan Tayal, Hongchao Zhang, Pushpak Jagtap, Andrew Clark, and Shishir Kolathaya
In 2024 IEEE 63rd Conference on Decision and Control (CDC), 2024
@inproceedings{tayal2024learning,author={Tayal, Manan and Zhang, Hongchao and Jagtap, Pushpak and Clark, Andrew and Kolathaya, Shishir},booktitle={2024 IEEE 63rd Conference on Decision and Control (CDC)},title={Learning a Formally Verified Control Barrier Function in Stochastic Environment},year={2024},pages={4098-4104},keywords={Training;Jacobian matrices;Sufficient conditions;Filters;Heuristic algorithms;Neural networks;Control systems;Safety;Collision avoidance;Autonomous vehicles},doi={10.1109/CDC56724.2024.10886052}}
ICC
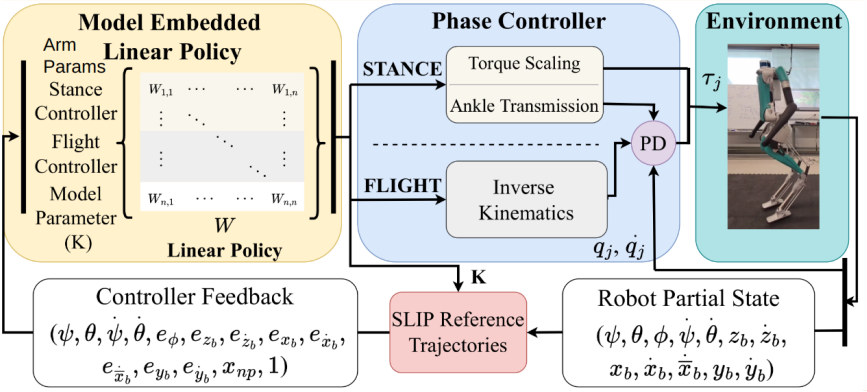
BiRoDiff: Diffusion policies for bipedal robot locomotion on unseen terrains
GVS Mothish, Manan Tayal, and Shishir Kolathaya
In 2024 IEEE Indian Control Conference (ICC), 2024
@inproceedings{mothish2024birodiff,title={BiRoDiff: Diffusion policies for bipedal robot locomotion on unseen terrains},author={Mothish, GVS and Tayal, Manan and Kolathaya, Shishir},booktitle={2024 IEEE Indian Control Conference (ICC)},year={2024}}
ACC
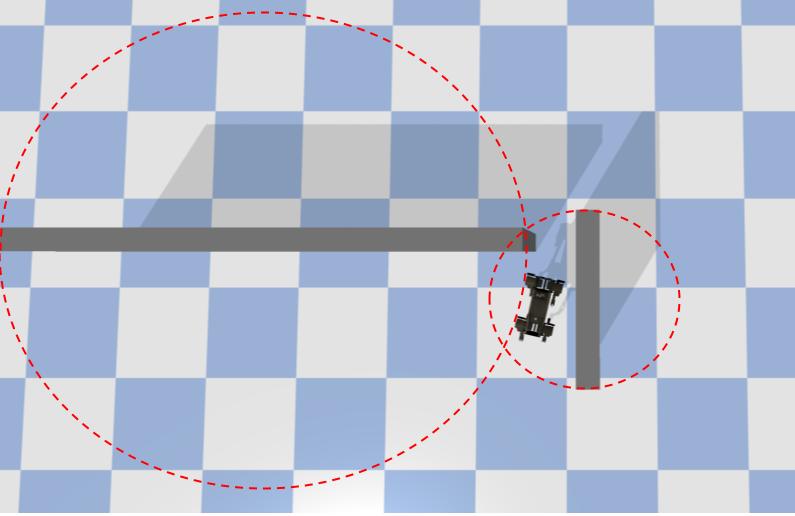
Control Barrier Functions in Dynamic UAVs for Kinematic Obstacle Avoidance: A Collision Cone Approach
Manan Tayal, Rajpal Singh, Jishnu Keshavan, and Shishir Kolathaya
@inproceedings{tayal2024control,author={Tayal, Manan and Singh, Rajpal and Keshavan, Jishnu and Kolathaya, Shishir},booktitle={2024 American Control Conference (ACC)},title={Control Barrier Functions in Dynamic UAVs for Kinematic Obstacle Avoidance: A Collision Cone Approach},year={2024},pages={3722-3727},doi={10.23919/ACC60939.2024.10644548},}
ACC
Collision Cone Control Barrier Functions: Experimental Validation on UGVs for Kinematic Obstacle Avoidance
@inproceedings{goswami2024collision,author={Goswami, Bhavya Giri and Tayal, Manan and Rajgopal, Karthik and Jagtap, Pushpak and Kolathaya, Shishir},booktitle={2024 American Control Conference (ACC)},title={Collision Cone Control Barrier Functions: Experimental Validation on UGVs for Kinematic Obstacle Avoidance},year={2024},pages={325-331},doi={10.23919/ACC60939.2024.10644338},}
ECC
Polygonal Cone Control Barrier Functions (PolyC2BF) for Safe Navigation in Cluttered Environments
@inproceedings{tayal2024polygonal,title={Polygonal Cone Control Barrier Functions (PolyC2BF) for Safe Navigation in Cluttered Environments},author={Tayal, Manan and Kolathaya, Shishir},booktitle={2024 European Control Conference (ECC)},pages={2212--2217},year={2024},organization={IEEE},doi={10.23919/ECC64448.2024.10591026}}
ICCAR
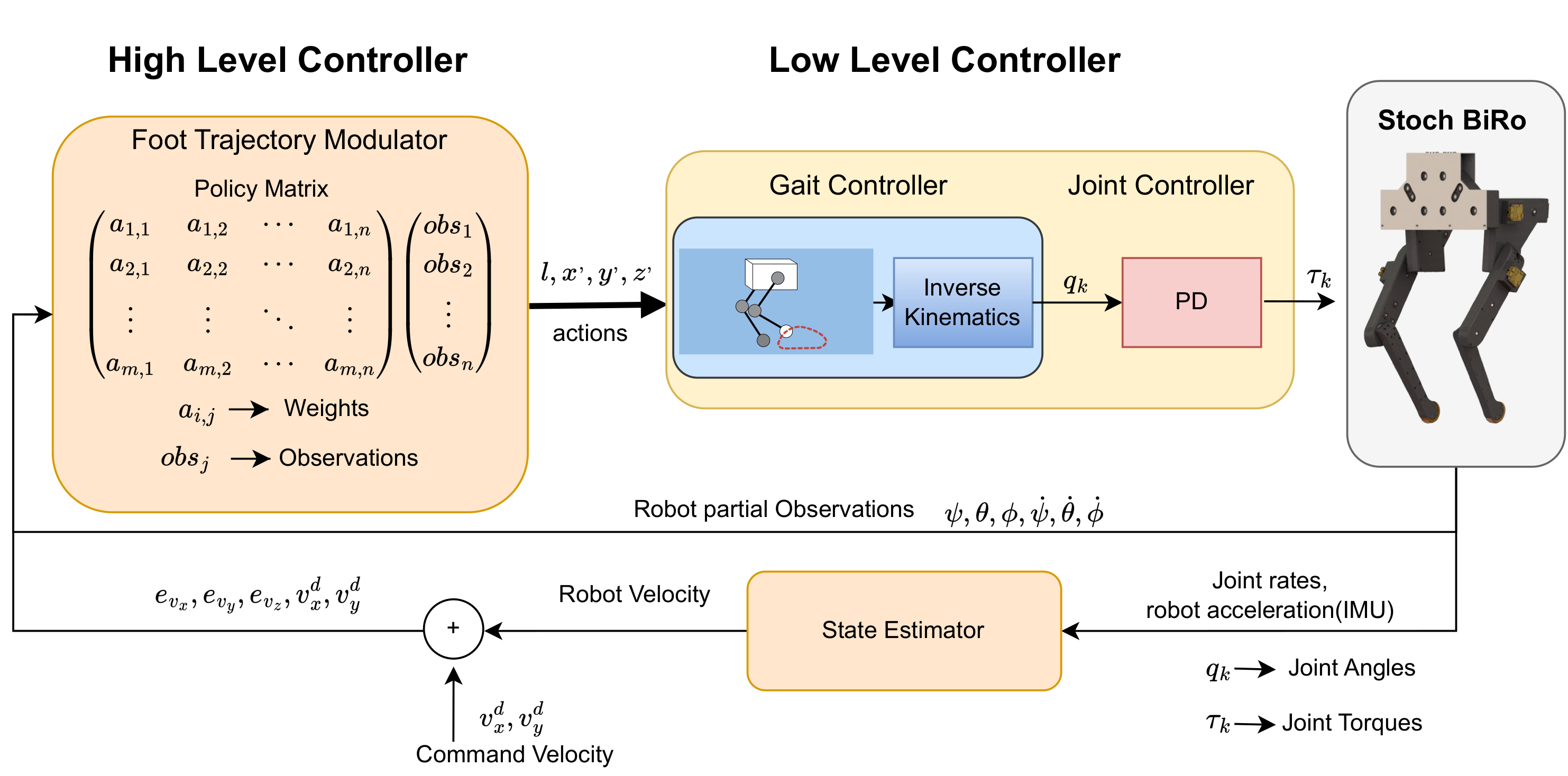
Stoch BiRo: Design and control of a low-cost bipedal robot
GVS Mothish*, Karthik Rajgopal*, Ravi Kola*, Manan Tayal, and Shishir Kolathaya
In 2024 10th International Conference on Control, Automation and Robotics (ICCAR), 2024
@inproceedings{mothish2024stoch,title={Stoch BiRo: Design and control of a low-cost bipedal robot},author={Mothish, GVS and Rajgopal, Karthik and Kola, Ravi and Tayal, Manan and Kolathaya, Shishir},booktitle={2024 10th International Conference on Control, Automation and Robotics (ICCAR)},pages={135--140},year={2024},organization={IEEE}}
2023
ICC
Collision cone control barrier functions for kinematic obstacle avoidance in ugvs
@inproceedings{thontepu2023collision,title={Collision cone control barrier functions for kinematic obstacle avoidance in ugvs},author={Thontepu, Phani and Goswami, Bhavya Giri and Tayal, Manan and Singh, Neelaksh and PI, Shyam Sundar and MG, Shyam Sundar and Sundaram, Suresh and Katewa, Vaibhav and Kolathaya, Shishir},booktitle={2023 Ninth Indian Control Conference (ICC)},pages={293--298},year={2023},organization={IEEE}}
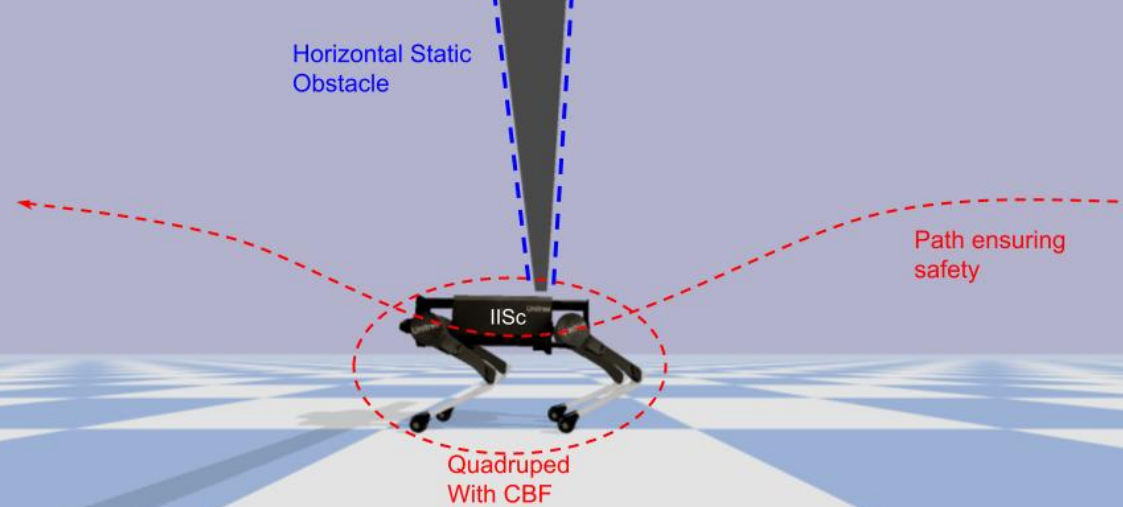
arXiv
Safe legged locomotion using collision cone control barrier functions (c3bfs)
@article{tayal2022realising,title={Realising the role of arms on improving the stability bipedal robots},author={Tayal, Manan and Kolathaya, Shishir},journal={2022 Cyber Physical Systems Symposium (CyPhySS)},year={2022}}


 Realising the role of arms on improving the stability bipedal robots2022 Cyber Physical Systems Symposium (CyPhySS), 2022
Realising the role of arms on improving the stability bipedal robots2022 Cyber Physical Systems Symposium (CyPhySS), 2022