Hi! I am Manan, a Visiting Researcher at Microsoft Research, working on safe agentic reasoning for Vision-Language-Action (VLA) models under Dr. Akshay Nambi. My research focuses on building trustworthy and safe AI for autonomous physical systems, spanning foundational models for Physical AI, agentic AI, offline reinforcement learning, and generative policy synthesis. I am broadly interested in developing principled methods that bring together learning and formal safety guarantees, ensuring that intelligent agents can operate reliably in the real world.
I recently completed my PhD at the Centre for Cyber Physical Systems, Indian Institute of Science (IISc) Bangalore, where I worked on Safe Robot Learning in the Stochastic Robotics Lab under Prof. Shishir N. Y. Kolathaya and Prof. Pushpak Jagtap. Prior to that, I completed my B.Tech from Indian Institute of Technology Bombay (IITB) in 2021.
I also frequently collaborate with Prof. Somil Bansal’s SIA Lab at Stanford University and Prof. Rahul Mangharam’s xLab at University of Pennsylvania.
Before joining Microsoft Research, I spent time at Fujitsu Research (NextGenAI Lab) improving VLA model inference under Dr. Manu Kaul. I have also worked as a Research Consultant at ARTPARK and as a Student Researcher at Washington University in St. Louis under Prof. Andrew Clark.
Click here for my detailed CV .
Follow me on Google Scholar, X (earlier twitter) and LinkedIn to keep informed with my latest research and projects.
News
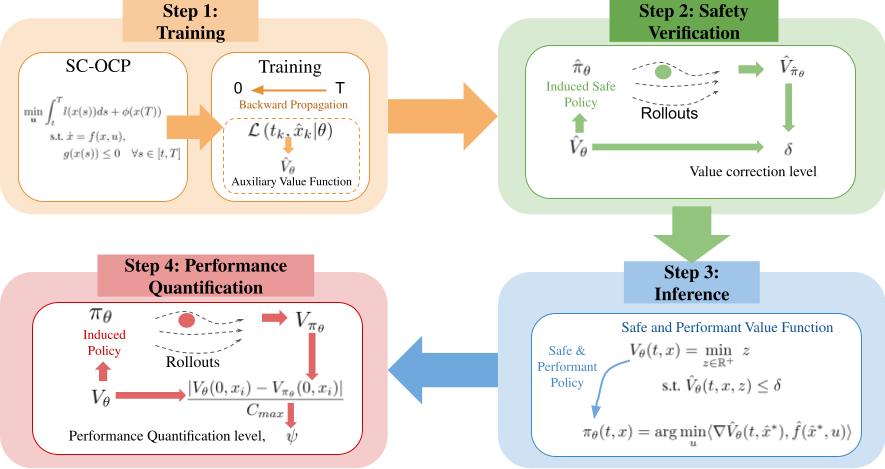
| Jul 05, 2026 | Our work titled Safe Flow Q-Learning: Offline Safe Reinforcement Learning with Reachability-Based Flow Policies, has been accepted at the Reinforcement Learning Conference (RLC), 2026! |
|---|---|
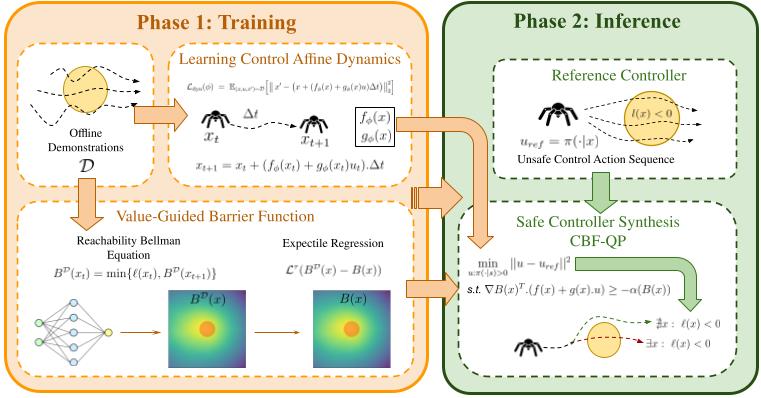
| Mar 28, 2026 | Our paper V-OCBF: Learning Safety Filters from Offline Data via Value-Guided Offline Control Barrier Functions has been accepted to Transactions on Machine Learning Research (TMLR)! |
| Jan 29, 2026 | Our paper A Collision Cone Approach for Control Barrier Functions has been accepted to IEEE Transactions on Control Systems Technology (TCST)! |
| Jan 16, 2026 | Our paper On Convergence of Adam with Data Dependent Stepsize has been accepted to IEEE Transactions on Artificial Intelligence (TAI)! |
| Jan 01, 2026 | Thrilled to join Microsoft Research India as a Visiting Researcher, working on Safe Agentic Reasoning for Vision-Language-Action (VLA) models! |