.jpg)
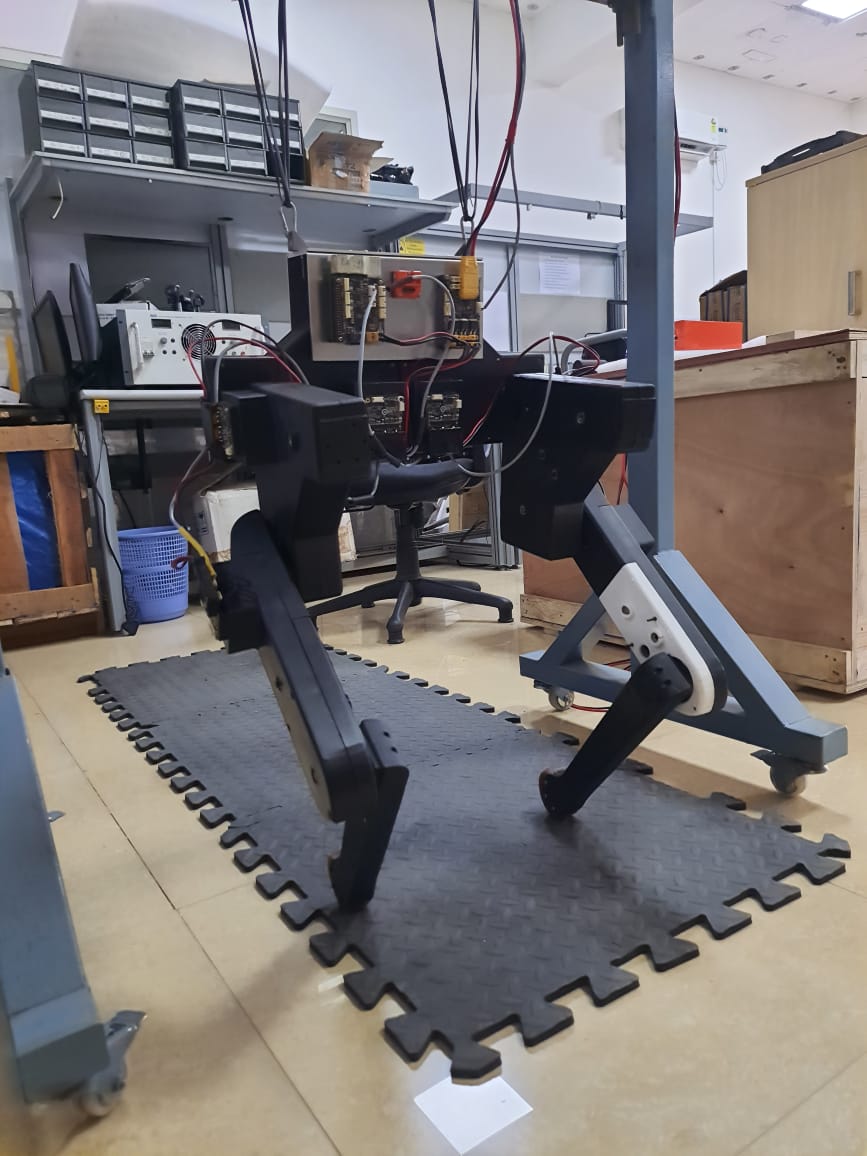
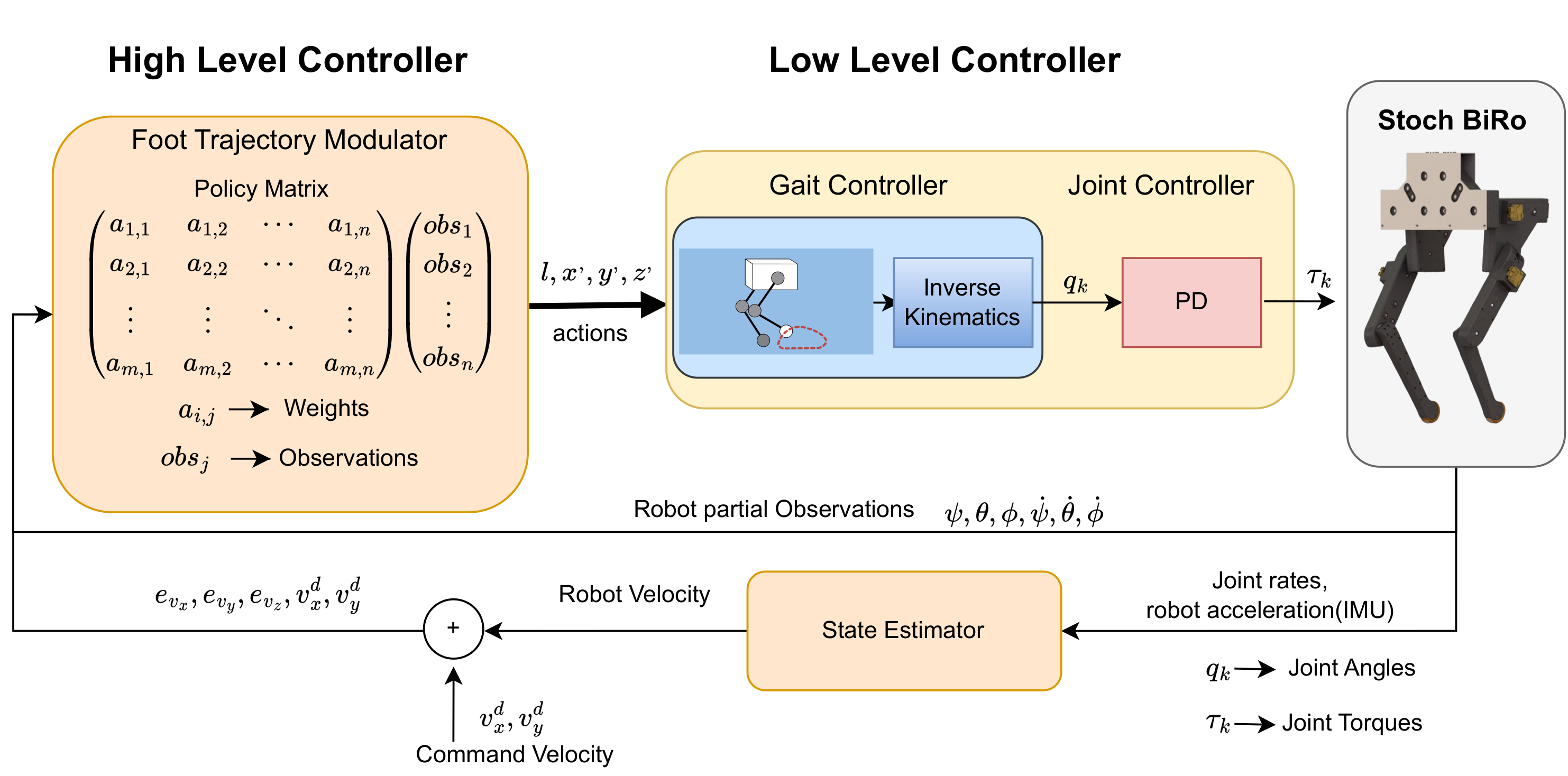
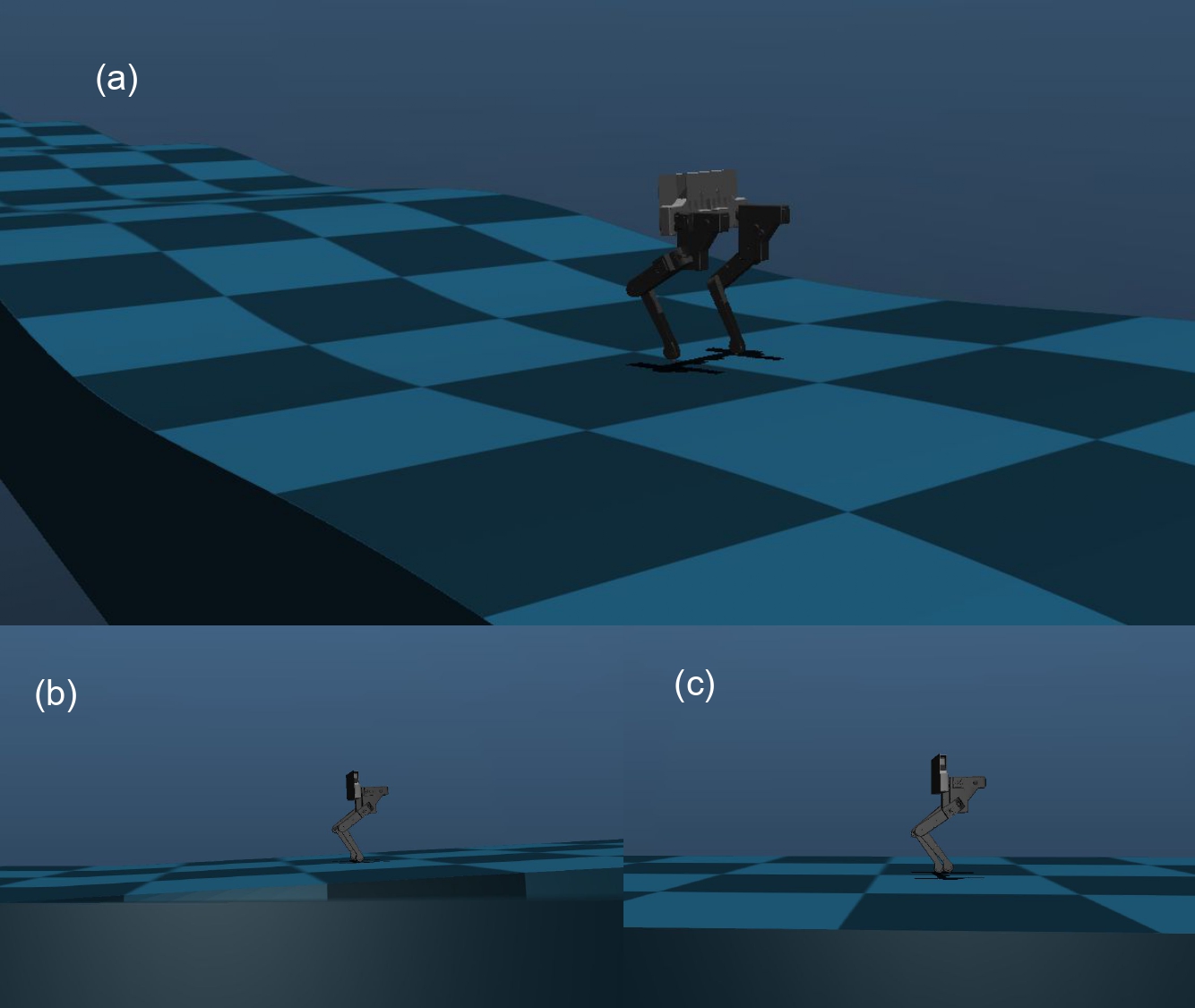
This paper introduces the Stoch BiRo, a cost-effective bipedal robot designed with a modular mechanical structure having point feet to navigate uneven and unfamiliar terrains. The robot employs proprioceptive actuation in abduction, hips, and knees, leveraging a Raspberry Pi4 for control. Overcoming computational limitations, a Learning-based Linear Policy controller manages balance and locomotion with only 3 degrees of freedom (DoF) per leg, distinct from the typical 5DoF in bipedal systems. Integrated within a modular control architecture, these controllers enable autonomous handling of unforeseen terrain disturbances without external sensors or prior environment knowledge. Demonstrating efficiency through low Cost of Transport (CoT) across varying walking speeds and blind stair climbing, the robot's policies are trained and simulated using MuJoCo, transferring learned behaviors to the Stoch BiRo hardware for initial walking validations. This work highlights the Stoch BiRo's adaptability and cost-effectiveness in mechanical design, control strategies, and autonomous navigation, promising diverse applications in real-world robotics scenarios.
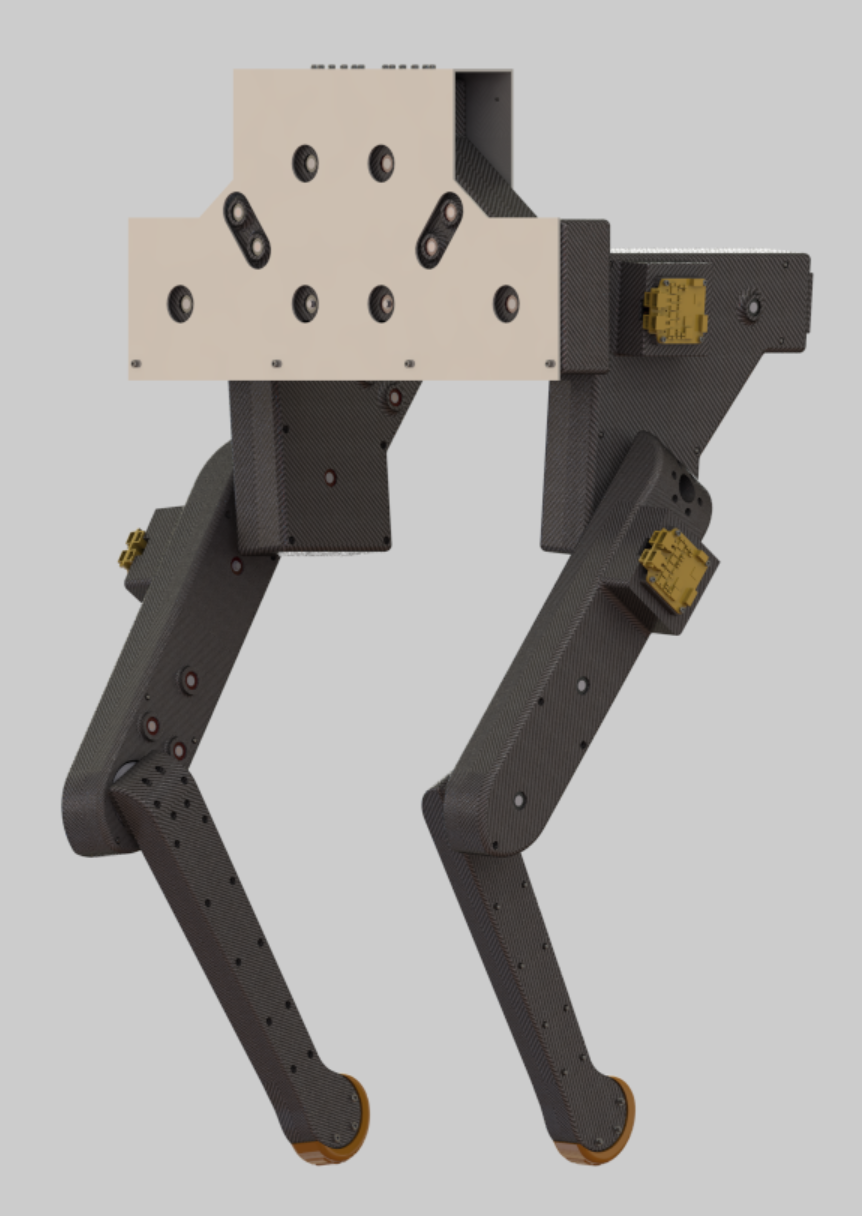
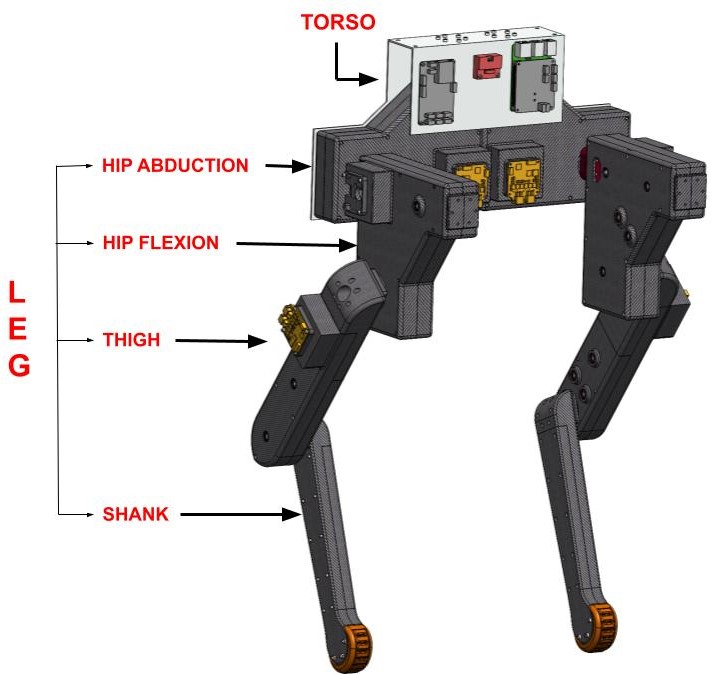
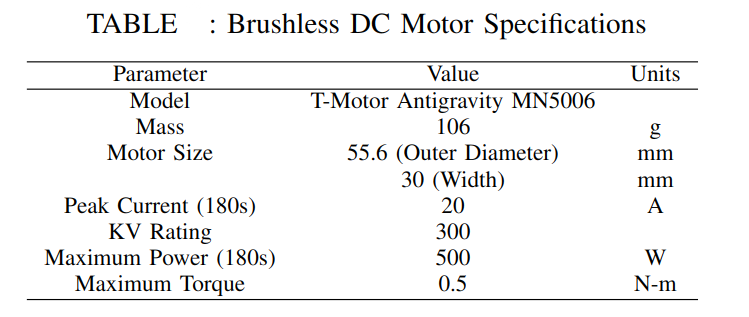
Stoch BiRo's design can be understood as an assembly of a central body module(torso) and two identical legs with three degrees of freedom in each leg. The torso consists of two L-shaped aluminum plates bolted together, along with electronic components, cable routing, and a power distribution board. Each leg has three actuator modules: hip abduction/adduction, hip flexion/extension, and knee flexion/extension, with a shank attached at the end. All the modules consist of a brushless DC motor (T-MotorAntigravity MN5006 KV300) coupled to dual-stage HTD timing belt actuation with a 3:1 reduction at each stage, resulting in an overall multiplication of 9 times the torque motor has to offer.
Abduction Module: The abduction module, as shown in below Fig, is the topmost module of a leg in the biped, which is responsible for the abduction/adduction movement in the frontal plane of the robot's hip, similar to that of humans. The module is attached to the torso plate and actuates the hip abduction-flexion coupling through the timing belts-pulleys system. This coupling is a part of the abduction joint, which connects the abduction and the flexion modules.
Hip Flexion Module: The hip flexion module (refer to Fig. \ref{hip}) is placed between the hip abduction and thigh modules. This module is mostly identical to that of the abduction module with few changes as it performs the flexion-extension motion in the sagittal plane. The hip-to-hip attachment in this module facilitates the transfer of actuation from the abduction motor. The output pulley is connected to a flexion-thigh coupling, forming the flexion joint, which connects the flexion and thigh modules.
Thigh Module: The thigh module (illustrated in Fig. \ref{thigh}) is responsible for the knee flexion/extension of the biped, similar to the primary movement of human knees. The motor in this module controls the knee joint through the thigh-shank coupling. The output pulley is attached to this coupling and the motion is transmitted to the shank module. Unlike the previous two modules which had a triangular configuration, the belts of this module are arranged linearly.
Shank: Shank is the lowest part of the biped leg, which runs from the knee to the foot. This module is similar to the structure of the thigh but without any of the actuating components (motors, belts, pulleys, etc.) and with a provision for foot attachment at its bottom end. A point contact foot made of polyurethane (PU) is attached to the end of the shank for better grip of the biped when in contact with a surface.
@article{gvs2023biro,
author = {Mothish, GVS and Rajgopal, Karthik and Kola, Ravi and Tayal, Manan and Kolathaya, Shishir},
title = {Stoch BiRo: Design and Control of a low-cost bipedal robot},
journal = {Arxiv},
year = {2023},
}