Hi! I am Manan, a Researcher working on problems at the intersection of Control, Optimization and Machine Learning, with a focus on safety enforced decision-making in dynamical systems. Developing methods that integrate learning with formal guarantees to ensure constraint satisfaction and robust performance in uncertain, data-driven environments.
I am PhD Scholar at Centre for Cyber Physical Systems, Indian Institute of Science (IISc) Bangalore, working on Safe Robot Learning in the Stochastic Robotics Lab under the guidance of Prof. Shishir N. Y. Kolathaya and Prof. Pushpak Jagtap.
I am actively collaborating with Prof. Somil Bansal at Stanford University and Prof. Andrew Clark at Washington University.
I completed my B.Tech from Indian Institute of Technology Bombay (IITB) in 2021.
Click here for my detailed CV .
Follow me on Google Scholar, X (earlier twitter) and LinkedIn to keep informed with my latest research and projects.
News
| Jul 16, 2025 | Our recent work titled Semi-Supervised Safe Visuomotor Policy Synthesis using Barrier Certificates, has been accepted to 64th IEEE Conference on Decision and Control (CDC) 2025, Rio, Brazil! |
|---|---|
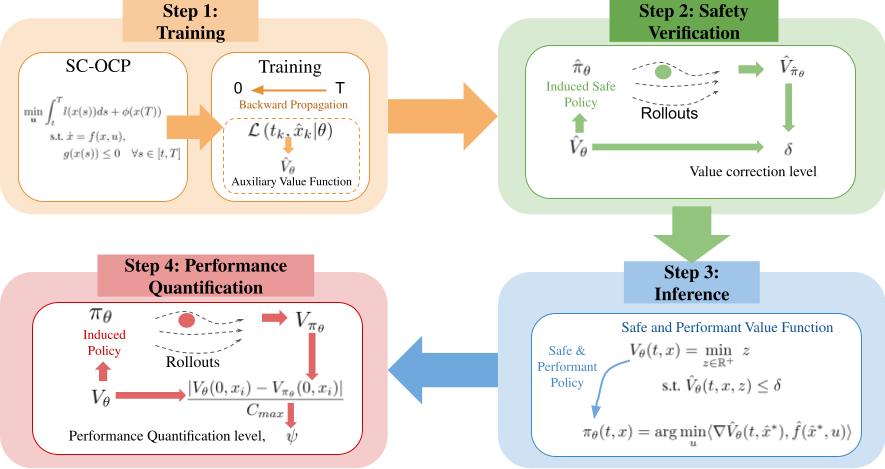
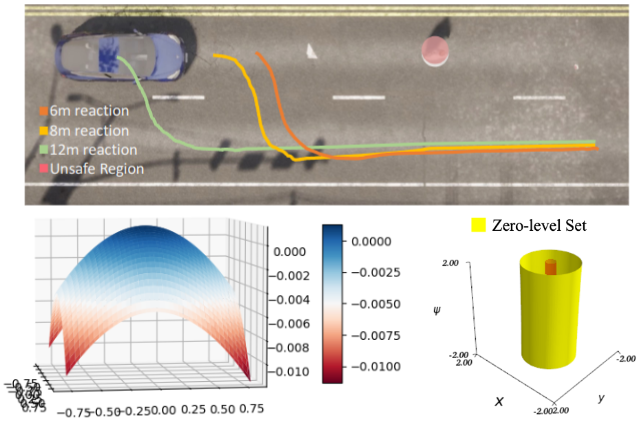
| May 01, 2025 | Our work titled A Physics-Informed Machine Learning Framework for Safe and Optimal Control of Autonomous Systems, has been accepted at the 42nd International Conference on Machine Learning (ICML) 2025, Vancouver, Canada! |
| Sep 17, 2024 | I am thrilled to announce that our paper, BiRoDiff: Diffusion policies for bipedal robot locomotion on unseen terrains, has been accepted at the Indian Control Conference (ICC) 2024, Bhopal, India! |
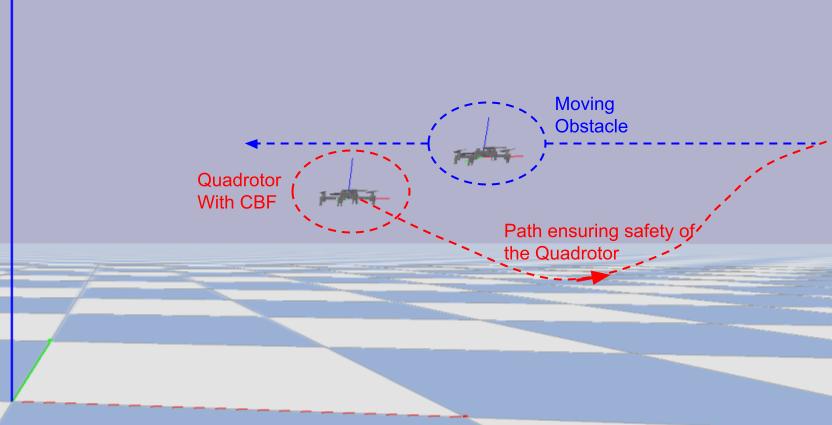
| Jul 20, 2024 | Our recent work titled Learning a Formally Verified Control Barrier Function in Stochastic Environment, has been accepted to 63rd IEEE Conference on Decision and Control (CDC) 2024, Milan, Italy! |
| Mar 02, 2024 | I am thrilled to announce that my paper, Polygonal Cone Control Barrier Functions (PolyC2BF) for safe navigation in cluttered environments, has been accepted at the European Control Conference (ECC) 2024, Stockholm, Sweden! |